


Drone Autonomy Software Platform Designed For System Integrators
.webp)
.png)








.png)







.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
FlytBase's enterprise-grade secure, reliable & scalable platform is designed for system integrators to seamlessly mix & match various components of the drone ecosystem, including hardware, BVLOS capabilities, and data analytics/management apps to fully automate custom workflows for enterprise use-cases like security, inspections, or emergency response.
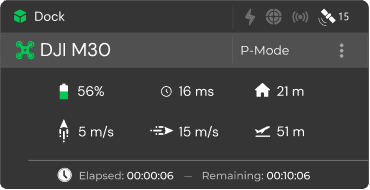
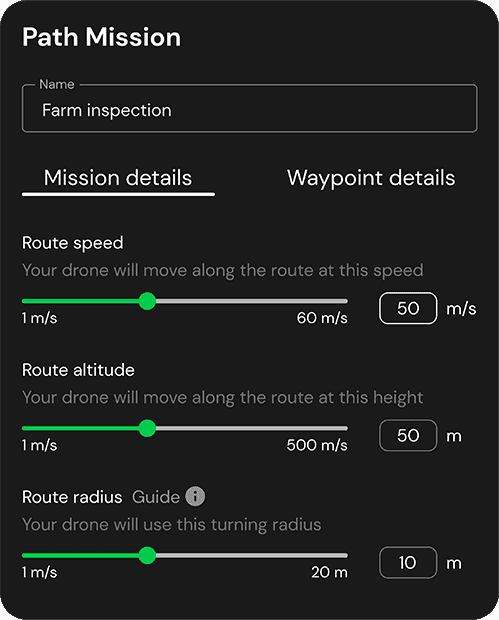
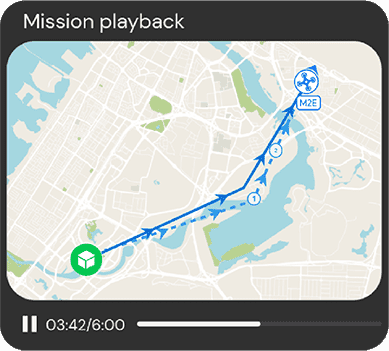
Drone & dock fleet management, from a unified command center software.
Here's why remote drone operators love FlytBase.
Built for BVLOS Drone Operations









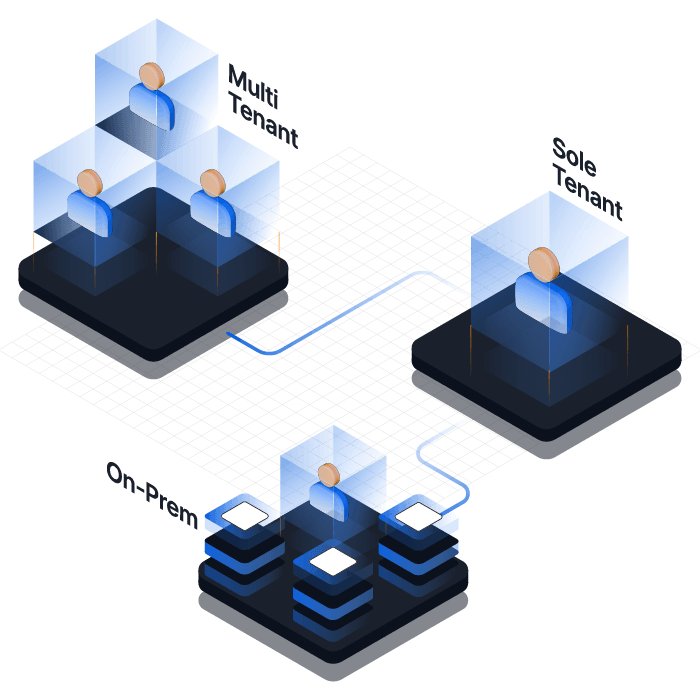
Built for Scalability & Reliability

Scalable Architecture
Fly one drone or hundreds of them. Manage one docking station or multiple. FlytBase’s scalable hosting infrastructure and enterprise-grade capabilities can meet all of your remote drone operation needs.
Reliable Infrastructure
With redundant nodes for each operation, FlytBase’s platform offers the highest levels of reliability. Several independent, parallel systems monitor the key aspects of the drone and box operation to maintain reliability in operations.
Fault Tolerance & Active Monitoring
The FlytBase backend system provides continuous 24x7 monitoring, identifying faults and automatically redirecting traffic to multiple backup servers. A well defined strategy ensures the faults are identified in time & addressed promptly.
Uncompromised on Security & Compliance

Supercharged by Apps & Integrations
Easily access APIs, integrate into custom apps for dock deployment, deliver data analytics and business insights to customers - the way they want it.
.png)
Private & Public App Library
Seamlessly integrate third-party apps, public or private, for domain-specific capabilities. The FlytBase app drawer provides easy access to expand functionality.
Build Your Own Apps
Utilize the intuitive App-Builder tool to quickly create and tailor custom apps on the FlytBase platform, effectively addressing your specific end-user requirements.
Existing Workflow Integration
Leverage FlytBase's modular architecture and APIs to seamlessly integrate with ERP, VMS, and alarm systems for enhanced operational efficiency.
Architected to be Hardware-Agnostic
Combine any drone, docking station, payload, accessory & sensor of your choice. FlytBase supports it all.
.png)
One Platform. Multiple Applications.




"FlytBase offered the perfect solution for our need to remotely control automated drones and docking stations with advanced safety features like smart return-to-home. Fully recommend."


We wanted to optimize inspection routes at the Genelba power plant since the area was too large for inspectors to cover in a single shift. We decided to employ the FlytBase-powered autonomous drone-in-a-box solution due to its superior unattended flight technology and affordable price.
.jpg)

.png)
We're invested in your success




















Partner network that extends globally
Tap into our customer base, expand your network and market your services to a larger audience in the dynamic world of aerial operations with FlytBase.
146
18
Customer love that spans worldwide




-2.png)






.png)

.png)
.jpg)
