

자율 드론 기술이 빠르게 발전하는 세상에서는 매 순간이 중요하며, 모든 임무에는 정밀함이 요구됩니다. FlytBase우리는 기업들이 임무 계획 및 일정 수립과 관련하여 직면하는 고유한 어려움을 이해합니다.
그래서 저희는 고객 여러분의 의견을 경청하고 탁월한 제어력, 유연성 및 효율성을 제공하기 위해 제품을 개선했습니다. 두 가지 획기적인 업데이트를 소개하게 되어 매우 기쁩니다.
- 동적 임무 일정 관리: 신속한 대응 및 유연한 간격
- 향상된 임무 계획: 제어, 맞춤 설정 및 효율성
동적 임무 스케줄러
임무 스케줄러는 보안 순찰 및 정기 자산 점검과 같은 일상적인 운영에 최적화되어 있습니다. 이전에는 임무 빈도를 15분 간격으로 설정했지만, 이제는 5분 단위로 유연하게 설정할 수 있어 시기적절하고 일관된 감시 활동을 보장합니다.
이것은 일반적인 사람들을 위한 것입니다. 항공 운항이는 보안에 민감한 영역에서 매우 중요하며, 특히 변경 관리가 필요한 자산에 대한 철저하고 정기적인 검사에 필수적입니다. 이 모든 것은 인적 개입을 크게 줄이면서 달성됩니다.
그 결과는 무엇일까요? 효율적이고 일관된 드론 배치입니다.

이것이 여러분에게 의미하는 바는 다음과 같습니다.
- 더 빠른 응답 속도: 드론은 변화하는 환경이나 새로운 작업에 신속하게 적응할 수 있어 역동적인 상황에 적합합니다.
- 효율성 향상: 스케줄링 간격이 짧아지면 드론의 유휴 시간이 줄어들어 전반적인 임무 효율성이 향상되고 작업 완료 시간이 단축됩니다.
{ {guide} }
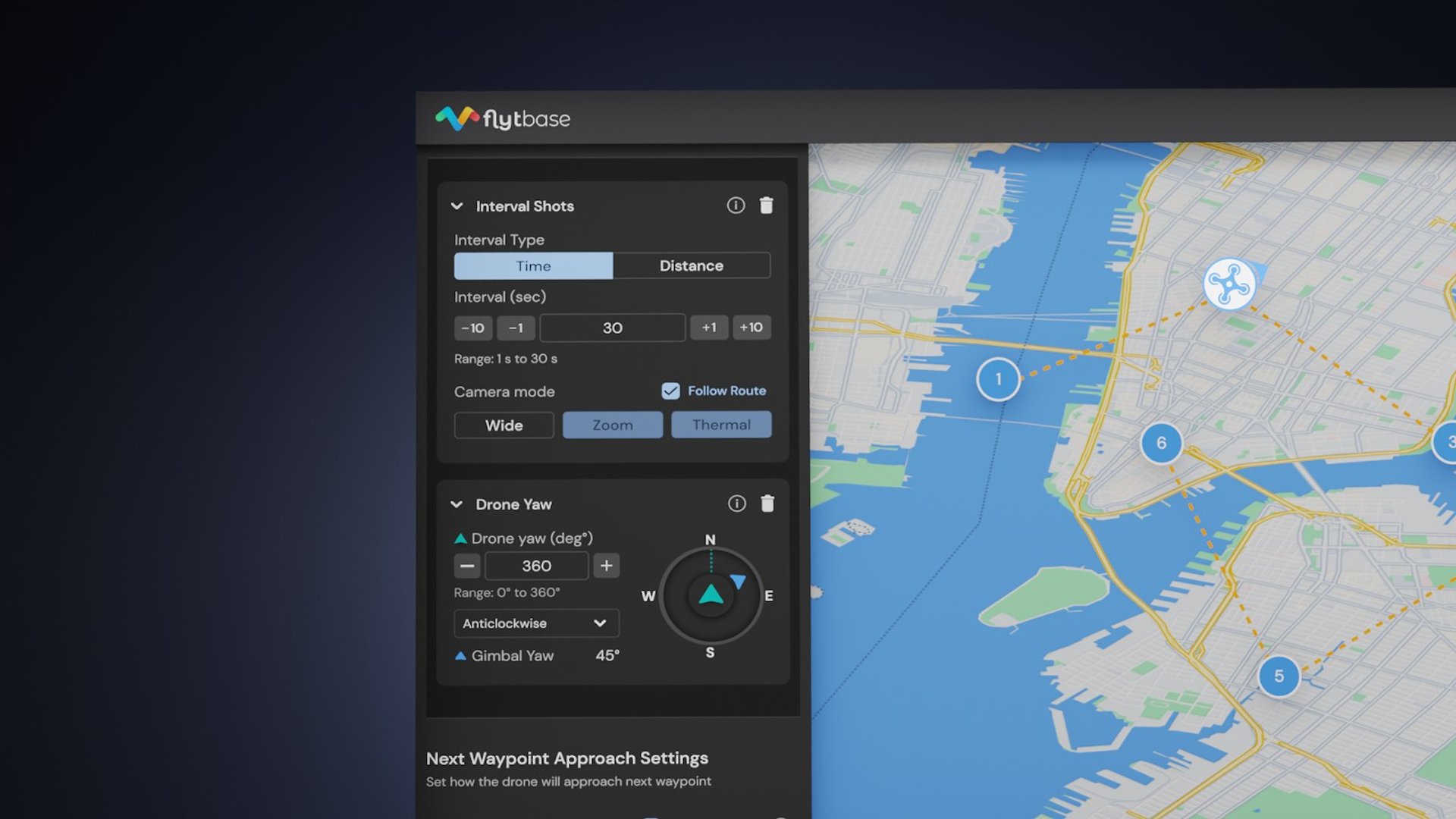
개선된 임무 계획
최신 미션 플래닝 업데이트로 전에 없던 완벽한 제어력을 경험해 보세요. 이 기능을 통해 드론 미션을 정확한 사양에 맞춰 맞춤 설정하고 목표에 완벽하게 부합하도록 할 수 있습니다. 드론부터 탑재물 구성까지 모든 세부 사항을 사용자의 요구에 맞게 조정할 수 있습니다. 어떤 새로운 기능이 추가되었을까요?
- 사용자 친화적인 인터페이스: 이번 UI 변화는 신선하고 현대적인 모습을 제공할 뿐만 아니라 직관적인 디자인 요소를 도입하여 탐색을 더욱 원활하게 하고 사용자 친화적인 상호 작용을 가능하게 합니다.
- 사용자 지정 WPML 흐름: 다른 애플리케이션의 WPML 파일을 간편하게 가져와 수정하고, 특정 요구 사항에 맞춰 신속하게 작업을 조정할 수 있습니다. 이를 통해 더욱 유연하고 맞춤 설정 가능한 환경을 구축할 수 있습니다.

- 고도 정밀도: 임무 요구 사항에 맞춰 "해수면(ASL)" 모드와 "지상면(AGL)" 모드 중에서 선택하여 간소화된 고도 제어를 경험해 보세요. 이를 통해 임무 수행 시 더욱 정확하고 정밀한 고도 제어가 가능합니다.

- 이륙 고도: 임무의 이륙 전략에 맞춰 "발사" 또는 "안전 이륙" 모드 중에서 선택하십시오. 이를 통해 다양한 이륙 전략에 유연하게 대응할 수 있으며, 원하는 방식으로 임무를 시작할 수 있습니다.

- 고급 웨이포인트 유형: 직선 경로, 경유지 이전 이동, 곡선 경로 또는 제어된 반경과 같은 모드를 사용하여 드론이 경유지를 탐색하는 방식을 정의하세요. 모든 임무는 사용자가 원하는 대로 맞춤 설정할 수 있으므로 특정 임무에 맞게 유연성과 맞춤 설정이 가능합니다.

- 요 제어: "경로 따라 비행", "요축 고정", "수동" 모드와 같은 옵션을 사용하여 드론의 방향을 사용자 지정할 수 있습니다. 이를 통해 임무 수행 중 드론의 방향을 더욱 정밀하게 제어하여 원하는 방향으로 비행하고 데이터를 수집할 수 있습니다.

- 페이로드 구성: 경로 또는 특정 웨이포인트 수준에서 줌, 와이드 또는 IR 모드와 같은 페이로드 옵션을 임무에 맞게 원활하게 설정할 수 있습니다. 필요에 따라 임무에 사용할 페이로드를 더욱 유연하게 구성할 수 있습니다.

- 새로운 임무 완료 조치: 더 일찍, "도킹 스테이션으로 돌아가기이전에는 유일한 종료 동작으로 ""를 선택했지만, 이제 "임무 종료 후 호버링"과 "첫 번째 웨이포인트로 이동 후 호버링" 중에서 선택할 수 있습니다. 이러한 유연성 추가를 통해 목표에 맞는 방식으로 임무를 마무리할 수 있게 되었습니다.

- 그리드 임무 최적화: 그리드 임무의 경우, 이미지 캡처 간격을 1초 정도로 짧게 설정하면 기존 최소 3초 대비 효율성이 두 배로 향상됩니다. 이는 그리드 임무에서 데이터 수집 속도를 높여 효율성을 향상시킵니다.

이번 업데이트는 임무 계획 방식을 혁신하여 특정 워크플로에 맞춰 항공 데이터를 효율적으로 수집할 수 있도록 설계되었습니다. 보안 및 감시, 자산 검사 또는 기타 특수 임무 등 어떤 분야에서든 유용하게 활용할 수 있습니다.
더 알고 싶으신가요?
자세한 사용 설명서를 참조하여 이러한 기능의 작동 방식을 알아보세요. 개선된 임무 계획 그리고 동적 임무 일정 관리.
더 자세한 기능들을 살펴보려면 다음을 참조하세요. FlytBase 사용자 설명서지난 업데이트를 놓치셨다면, 최근 몇 달 동안 저희가 제공한 내용을 확인해 보세요. 여기.
FlytBase 통해 드론 운영을 간소화하고 새로운 가능성을 열어보세요. 궁금한 점이나 문의 사항이 있으면 언제든지 연락 주세요. support@flytbase.com저희는 여러분의 모든 과정을 지원해 드리겠습니다!
FlytBase 솔루션으로 드론 운영을 자동화하세요
저희 전문가와 상담하세요.