


对于超视距(BVLOS)无人机作业的企业而言,精准的地形信息对于安全性和效率至关重要。传统的二维地图在飞行员无法目视评估地形状况时往往不够用,这可能会影响作业安全和数据质量。
FlytBase的全新点云和高程地图叠加层通过引入先进的 3D 地形可视化技术来应对这一挑战。 超视距无人机任务规划 并实现厘米级精度和全面的地形感知。
点云和高程图叠加为超视距无人机操作提供 3D 地形可视化,在飞行员无法直接看到无人机时,可提供厘米级精度和全面的地形理解。
DTM、DSM 和点云之间有什么区别?
理解这些映射概念对于有效进行超视距飞行作业至关重要:
数字地形模型(DTM)
表示没有植被、建筑物或构筑物的裸露地面。
最适合超视距飞行作业:
- 安全高度规划和飞行路径优化
- 应急响应任务中的洪水分析
- 用于公用设施巡检的基础设施走廊测绘
- 建筑工程的基线地形分析
数字表面模型(DSM)
包括所有地表特征,如建筑物、植被和电力线,并按实际高度显示。
对自主无人机至关重要:
- 城市障碍物规避和建筑物高度数据
- 农业作业中的植被冠层分析
- 通信塔的视线计算
- 充分具备环境意识,确保安全航行
点云
数百万个精确的 3D 坐标点(X、Y、Z),精度达到厘米级。
生成方式:
- 激光雷达传感器: 使用专业激光雷达系统进行直接激光测量
- 摄影测量: 利用先进算法处理重叠的航空影像
- 混合方法: 结合多个数据源以实现全面覆盖
特征
DTM
DSM
点云
显示地面
✅ 仅限地面
✅ 地面 + 物体
✅ 所有已分类积分
显示障碍
❌ 已移除
✅ 全高
✅ 详细结构
准确性
分米
分米
厘米级
最佳用途
洪水模型
避障
详细分析
FlytBase支持哪些文件格式
FlytBase支持全面的地形数据格式,适用于专业的超视距飞行作业,其功能远超传统方式。 盒装无人机 功能:
点云格式
LAS (.las) 文件
- 行业标准 适用于高精度三维点云
- 典型精度:厘米级精度
- 最适合:专业激光雷达测量数据
- 文件大小:每平方公里 50MB - 2GB
LAZ (.laz) 文件
- 压缩后的LAS格式,无质量损失
- 文件大小减少:最多可减少 80%
- 最适合:大规模部署和云存储
- 处理速度:更快的上传和下载速度
高程图/地形图格式
TIFF/GeoTIFF (.tif/.tiff)
- 高分辨率、地理参考图像
- 支持所有主要坐标系
- 最适合:精准农业和建筑业
- 分辨率:亚米级至厘米级精度
DEM (.dem) 文件
- 用于地形剖面分析的数字高程模型
- 规则网格格式,包含高程值
- 最适合:基础设施规划和分析
- 应用领域:坡度计算和流域分析
IMG(.img)格式
- 针对大面积数据集进行了优化
- 高效处理区域地图数据
- 最适合:遥感工作流程
- 与主流GIS软件兼容
标准参考格式
- PNG/JPG: 视觉参考叠加和历史对比
- 其他 GeoTIFF 文件: 地理参考地图和正射影像
格式指南: 使用 LAS/LAZ 进行详细的 3D 分析,使用 TIFF/GeoTIFF 进行高程测绘,使用 DEM 进行地形剖面分析,使用 PNG/JPG 进行视觉参考。
如何将点云数据添加到FlytBase
FlytBase地形数据添加功能旨在方便不具备 GIS 专业知识的无人机操作员使用:
分步实施过程
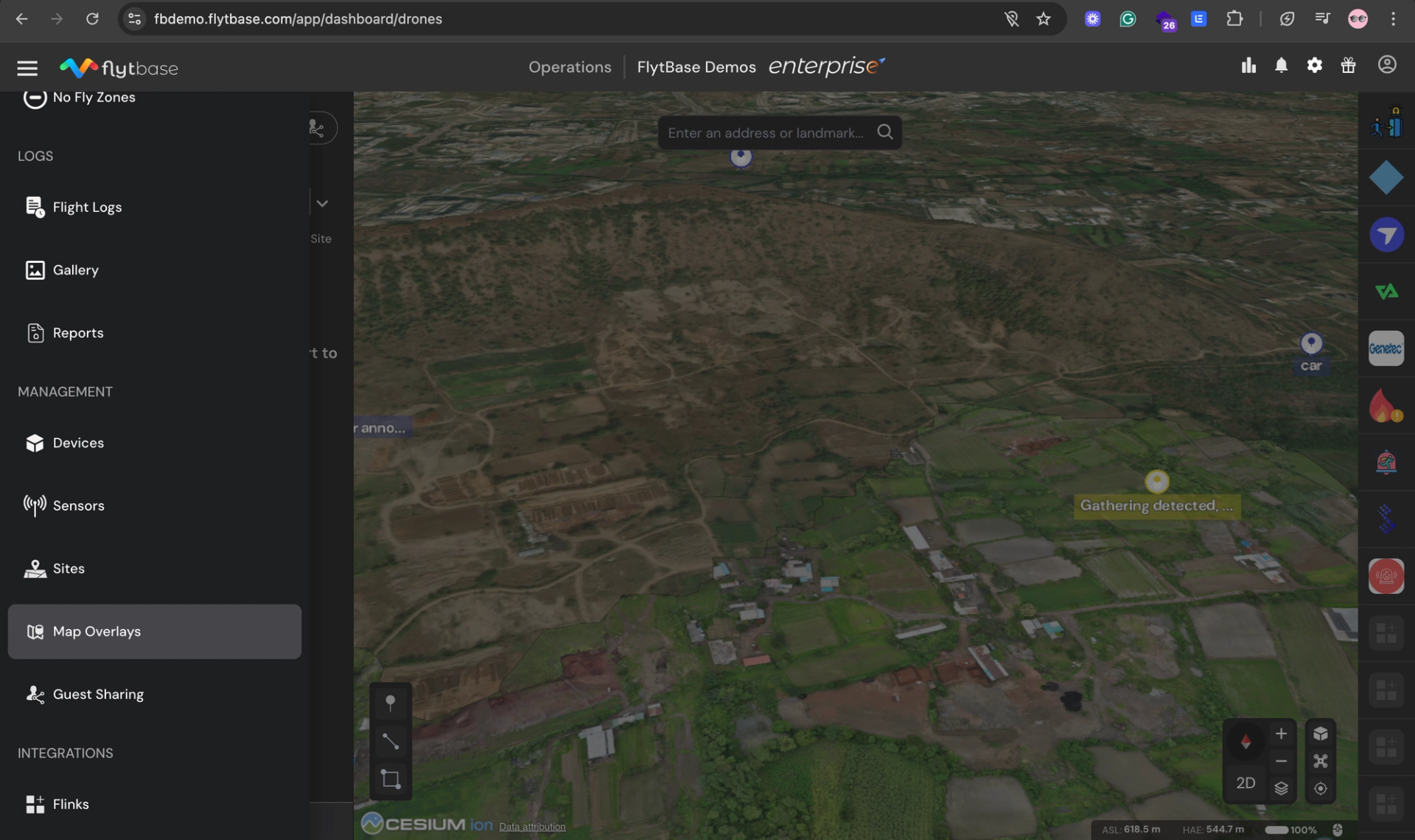
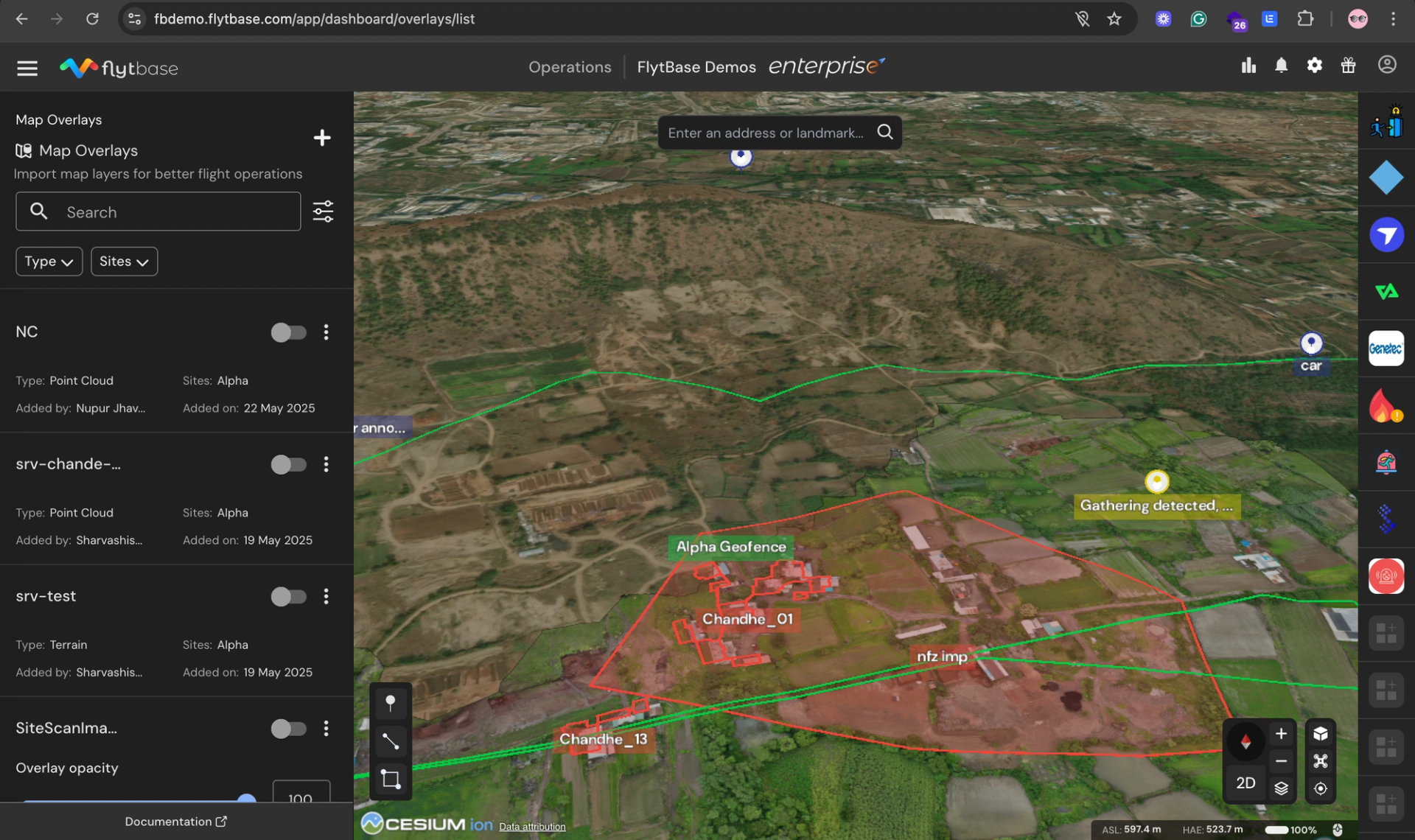
1. 访问地图叠加层
- 打开FlytBase Dashboard 导航抽屉
- 从功能列表中选择“地图叠加层”。
- 访问叠加层管理界面
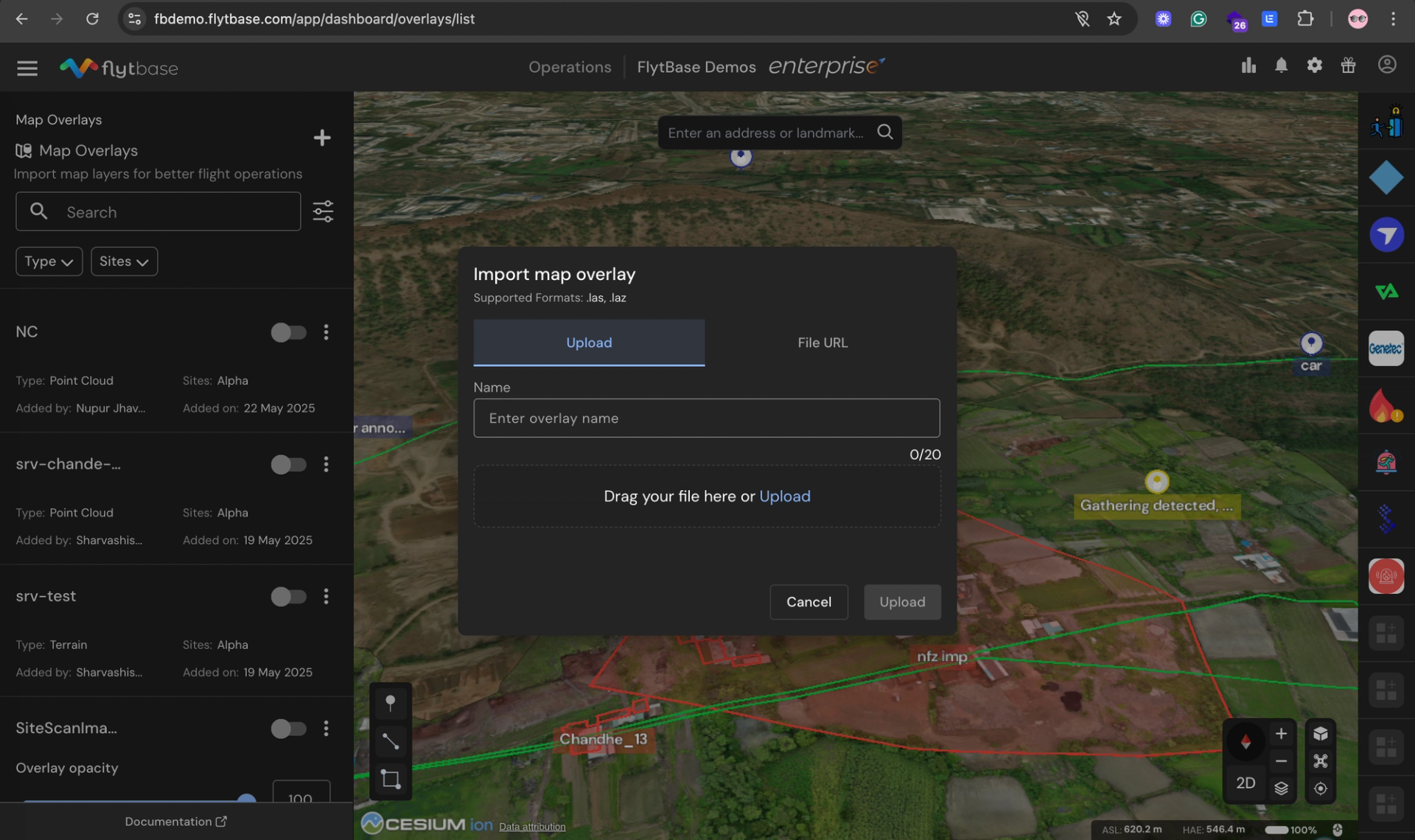
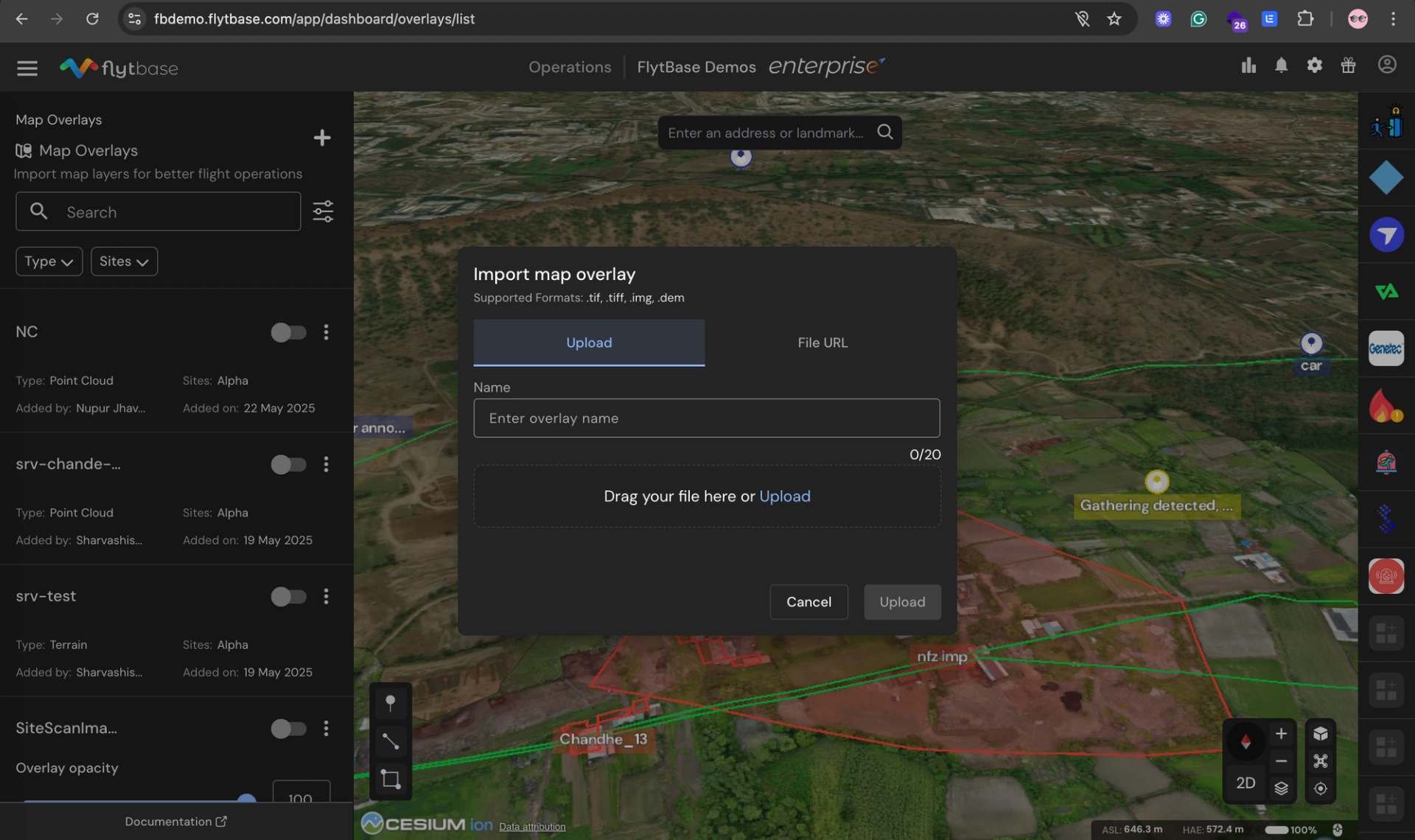
2. 上传新数据
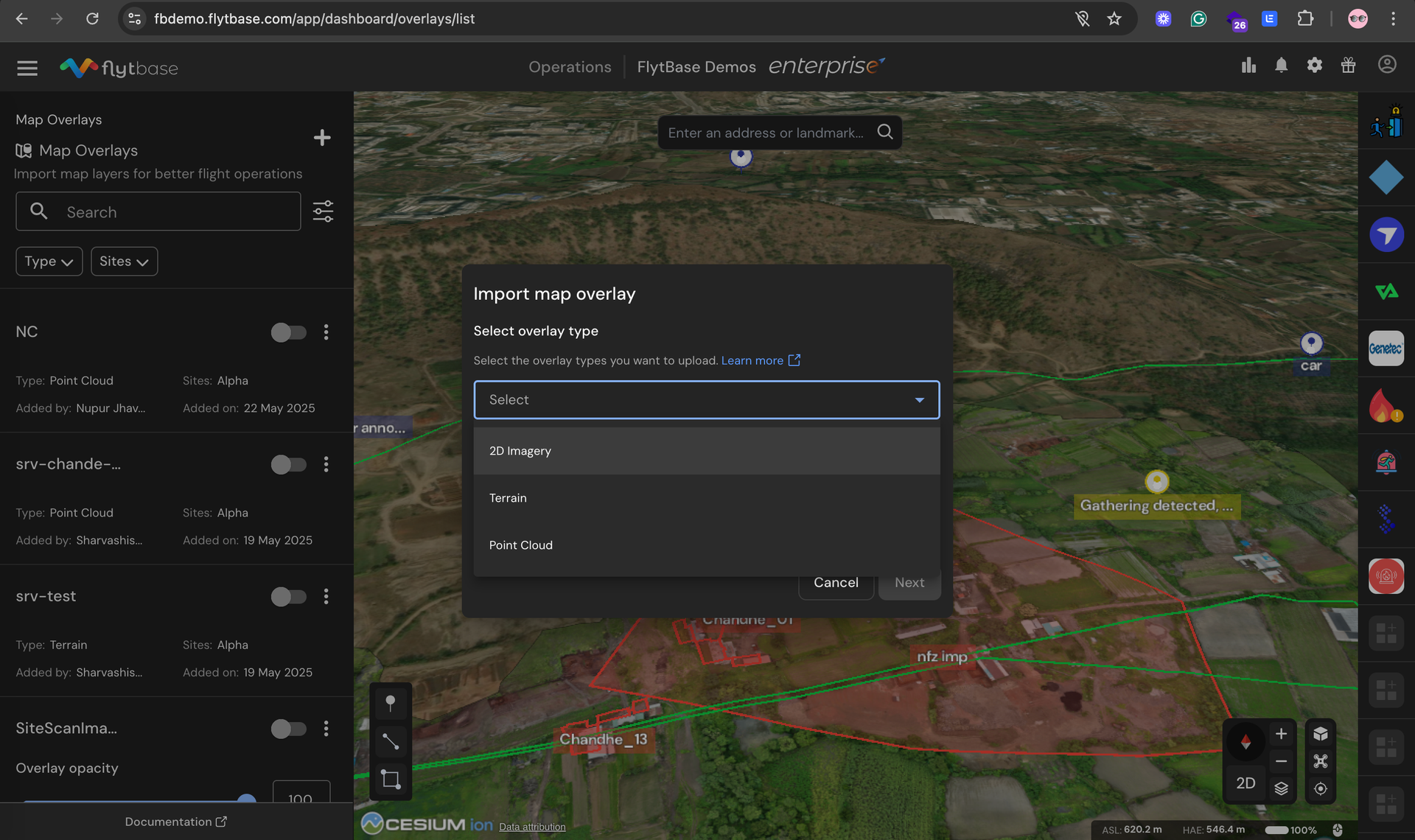
- 点击“+”图标开始导入过程
- 选择数据类型:二维影像、地形数据或点云
- 指定可显示叠加层的运行站点
- 直接上传文件或提供可下载链接
- 给你的叠加层命名并完成上传
3. 配置显示设置
- 使用滑块调整不透明度(0-100%透明度)
- 为特定任务切换叠加层开启/关闭
- 使用搜索和筛选功能整理多个数据集
- 根据需要编辑站点分配和描述
4. 使用 GTL 执行飞行任务
- 打开时启用 M
- 在地图上选择你想投放无人机的地点。
- 根据地形和障碍物高度,使用 AGL 设置高度裕度。
- 点击启动,观看无人机沿着安全航线飞行,并根据地形和障碍物进行调整。
用户还可以利用高级地形可视化功能(即将推出)在 3D 环境中规划任务。
处理和访问时间
- 上传处理: 大多数数据集需要 5-10 分钟。
- 可视化准备就绪: 处理后立即
- 团队访问权限: 授权用户之间即时共享
- 文件大小支持: 使用 LAZ 压缩,最大可达 10GB
哪些行业最能从点云地图中受益
点云和高程图叠加可在多个领域带来可衡量的结果:
建筑与采矿
应用领域:
- 堆料体积计算 准确率超过 99%
- 进度跟踪 通过自动变更检测
- 切割/填充分析 用于开挖规划优化
能源与公用事业
应用领域:
- 太阳能发电场优化 使用DTM进行面板布局
- 输电线路规划 采用地形感知飞行路径
- 风力涡轮机选址评估 为了达到最高效率
农业
应用领域:
- 田间排水优化 用于侵蚀控制
- 精准灌溉设计 利用详细的地形
- 作物健康监测 结合高程数据
公共安全与应急响应
应用领域:
- 灾区地图绘制 具有精确的3D可视化效果
- 搜救计划 具备地形感知能力
- 洪水模型 用于疏散路线规划
入门指南:快速实施指南
成功实施点云和地形测绘需要系统规划:
第一阶段:准备阶段(第1周)
数据评估:
- 清点现有地形数据并找出数据缺口
- 评估当前无人机设备的兼容性
- 评估团队培训需求和技能水平
- 明确成功指标和投资回报率预期
数据源选项:
- 政府数据集: 免费 USGS LiDAR 数据(精度 1-2 米)
- 商业供应商: 定制测量费用为每英亩 2-25 美元
- 内部收藏: 基于无人机的摄影测量或激光雷达
第二阶段:设置和配置(第二周)
FlytBase实现:
- 完成FlytBase注册流程
- 上传和配置地形数据叠加层
- 设置站点分配和团队访问权限
- 与现有任务规划工作流程集成
第三阶段:训练和部署(第3周)
团队赋能:
- 完成FlytBase培训(通常需要 4-8 小时)
- 在代表性地点执行试点项目
- 用传统方法验证结果
- 根据初步结果改进流程
需要追踪的成功指标
- 缩短任务规划时间
- 安全事故减少
- 调查准确性提升
- 成本节约目标
- 团队采纳率
实施时间表: 大多数组织可在 3-4 周内完成全面部署,并在 6-12 个月内实现投资回报。
立即变革您的超视距飞行作业
点云和高程地图叠加技术代表了企业级超视距无人机作业的一项重大进步。通过实现真正的三维地形可视化,企业可以:
- 通过全面的地形感知提高安全性
- 通过更快、更准确的任务规划提高效率
- 通过自动化勘测和分析降低成本
- 基于精确的3D数据做出更好的决策
准备好利用先进的地形可视化技术提升您的超视距无人机作业水平了吗?