

在无人机自主飞行领域,飞行高度不仅仅是屏幕上的一个数字,它更是一个影响安全、效率和任务成功与否的关键决策。无论您是在崎岖地形上空飞行、在城市屋顶间穿梭,还是在工业区巡逻,一个挑战始终存在:如何确保无人机在整个飞行过程中保持最佳飞行高度?正因如此,我们隆重推出“任务高度”(Task Altitude)功能,这是FlytBase任务规划工具包中的一项强大新功能,它赋予无人机操作员前所未有的水平巡航高度控制能力。“任务高度”专为追求精准的专业人士而设计,即使在复杂的地形条件下,也能让您精确配置无人机在起飞和到达目的地之间应保持的高度。
如果您正在寻找高级无人机任务规划软件、更好的无人机高度控制或更智能的地形跟踪无人机功能,那么此功能更新正适合您。
什么是任务高度?
任务高度是指无人机从当前位置水平飞行到目标航点过程中所保持的高度。它相当于巡航高度,不同于无人机的安全起飞高度或最终航点高度。
此功能使无人机操作员能够:
- 避免飞行途中高度骤降,以免发生碰撞或效率下降。
- 在地形多变或有障碍物的情况下,保持安全稳定的飞行高度。
- 自定义海拔路径,同时确保速度、安全性和数据准确性
简单来说:任务高度是大多数无人机飞行计划工具中缺失的部分,它能让您实现 A 点和 B 点之间的智能高度控制。
为什么传统飞行计划会失效
大多数无人机操作员都依赖于基本的高度设置: 安全起飞高度 (发射后的初始高度) 航点高度 (到达目的地时的最终高度)。但中间的所有高度呢?
在现实世界中,这种“只有开始和结束”的方法往往会造成严重问题:
- 任务途中高度骤降会增加与建筑物、起重机、树木或地形发生碰撞的风险。
- 低效的绕行路线会浪费时间和电池电量,因为无人机会采取不必要的谨慎路线。
- 有限的灵活性阻止了根据实时情况进行飞行中高度的变化。
在以下情况下,这种情况尤其危险:
- 具有垂直结构的工业区
- 具有高程变化的露天矿
- 城市地区建筑高度不统一
- 地形崎岖不平的丘陵农场或森林
这就是任务高度的作用所在,它使操作员能够控制…… 全部的 飞行路线,而不仅仅是起点和终点。
任务高度如何运作
任务高度功能可让您定义无人机在水平飞行期间应保持的高度,从而弥合起飞和目的地之间的距离。它与两个常用参数--安全起飞高度和航点高度--配合使用,可创建完全优化的 3D 飞行路径。
它的行为方式如下:
- 如果任务高度高于起飞高度和目的地高度: 无人机将爬升至任务高度,水平巡航,然后垂直下降到达目的地。
- 如果任务高度低于起飞高度和目的地高度: 无人机将从当前位置斜向飞往航点,从而优化速度和效率。
- 如果一个海拔较高,另一个海拔较低: 无人机能够智能地进行调整,在提高安全性或操作一致性时使用任务高度。
灵活配置:
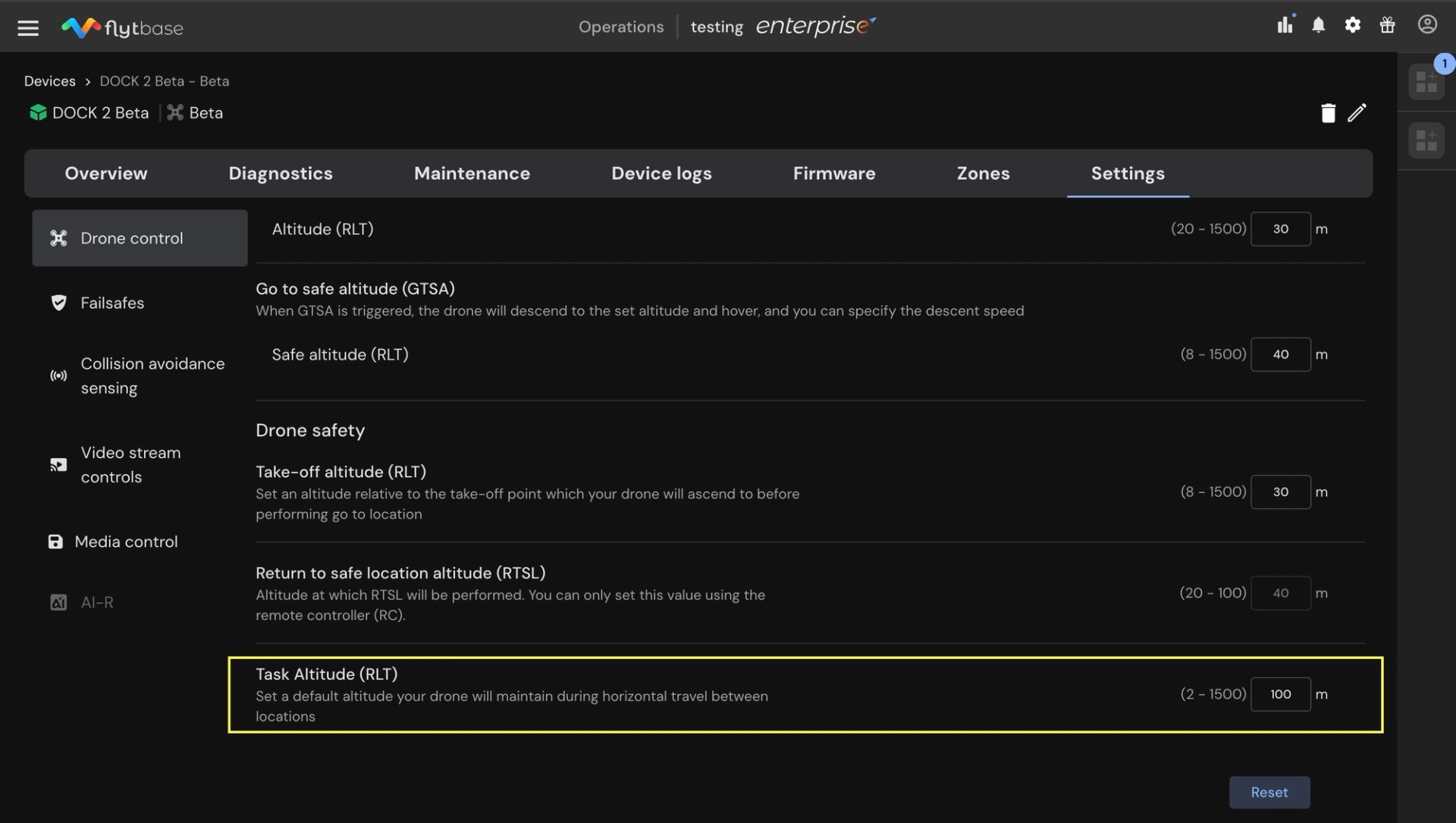
- 在FlytBase控制面板中为每个设备设置默认任务高度。
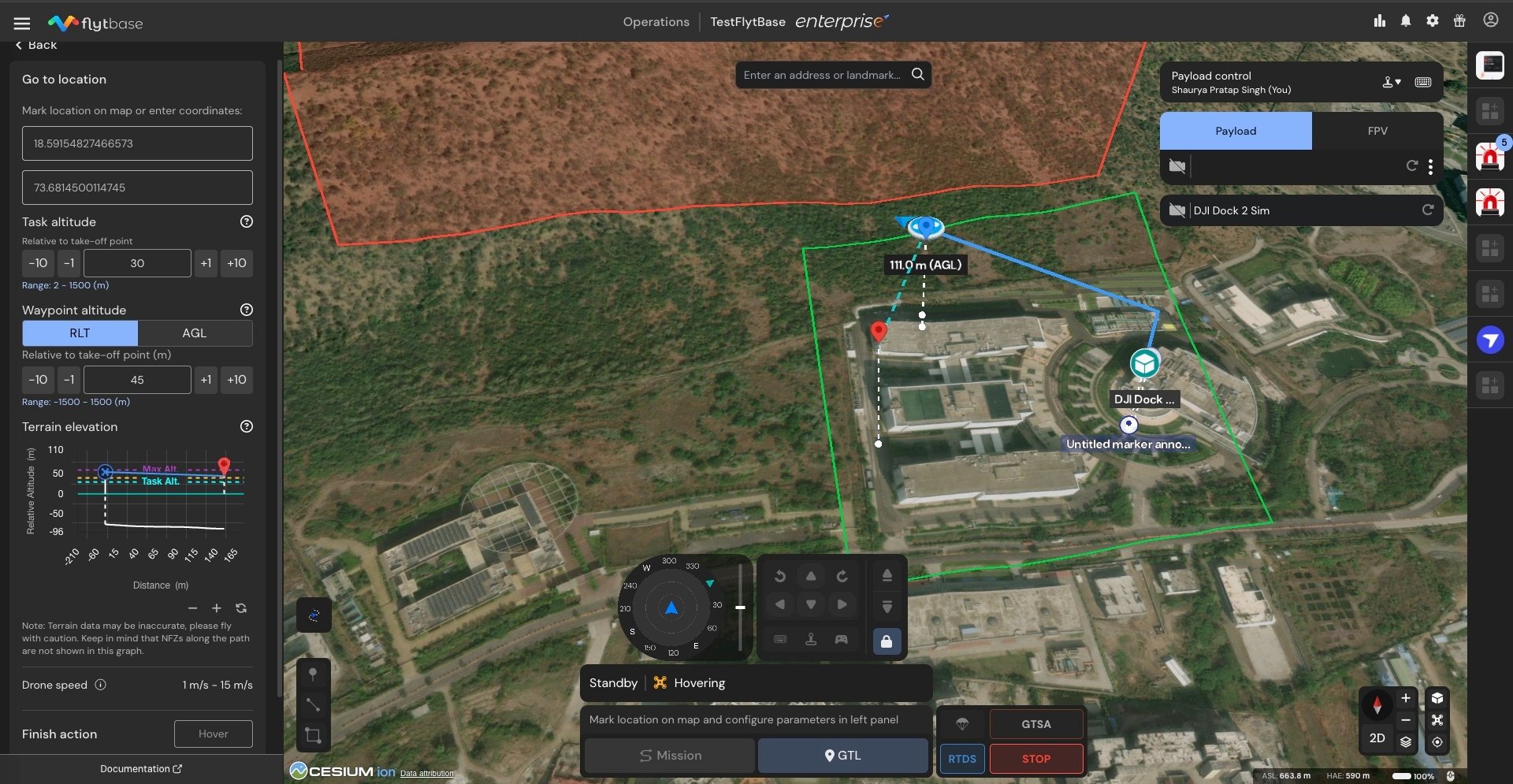
- 在“前往位置”规划界面中,根据任务要求更改高度值。
- 在飞行过程中对其进行修改,无需停止或重新启动操作,修改后的指令将应用于下一个后续的 GTL 任务指令。
FlytBase还提供实时地形可视化功能,将任务高度以清晰的水平线显示在地形剖面图中。当预设路径过于接近地形或障碍物时,它会发出视觉警报,从而帮助飞行员做出更明智的决策。
最关键的领域:行业与应用案例
行业
用例
任务高度如何提供帮助
石油和天然气
监测管道和火炬塔
允许将巡航高度设置在危险基础设施上方,从而提高安全性和自动化程度。
矿业
露天矿和尾矿坝勘测
在崎岖不平的地形上保持稳定的高度,以避免下沉并降低碰撞风险。
建造
在有起重机和脚手架的工地上作业
通过保持安全巡航高度来防止与临时建筑物发生碰撞
安全与监控
在院落或设施周围进行周界巡逻
确保飞越墙壁和车辆时保持水平飞行,保持视线畅通并避开障碍物。
关键基础设施
能源工厂、变电站或水坝附近的检查
提高在敏感或高价值资产附近飞行时的安全性和可预测性。
准备好掌控你的飞行高度了吗?
借助任务高度功能,无人机操作员无需再在安全性和效率之间做出妥协。无论您是在工业设施周围导航、飞越崎岖地形,还是进行精准巡检,此功能都能让您清晰、精准地规划飞行路径,充满信心。
Task Altitude专为实际任务而设计,深受石油天然气、采矿、建筑和关键基础设施等行业企业的信赖,现已集成到您的FlytBase控制面板中。
预约现场演示: flytbase.com/contact
请阅读FlytBase文档: docs.flytbase.com